Lekcja 3: Składamy własnego robota - część 1
Czas na realizację zajęć: 45 minut
Zaleca się realizację lekcji 3 i 4 razem, co daje łącznie 90 minut.
Wprowadzenie (krótki opis zajęć):
Pierwsza z dwóch godzin lekcyjnych, w trakcie której uczniowie skręcają szkielet robota-pojazdu. Zaleca się, aby lekcję 3 i 4 realizować na lekcji łączonej (razem 90 minut).

Cele zajęć
Uczeń powinien:
- Umieć skorzystać z instrukcji składania.
- Posługiwać się śrubokrętem, śrubkami i nakrętkami przy skręcaniu elementów.
- Skręcać / łączyć samodzielnie poszczególne elementy szkieletu.
- Skręcić boki pojazdu i zamontować w nich silniki.
- Przykręcić sterownik do korpusu.
- Przygotować ścianę frontową pojazdu z czujnikiem odległości.
·
Pojęcia kluczowe:
- Sterownik LOFI Brain
- Powerbank
- Elementy konstrukcyjne / szkielet robota
- Śrubka, nakrętka
- Silnik
- Moduły: czujniki odległości
Treści programowe (związek z podstawą programową)
Podstawa programowa kształcenia ogólnego dla szkół podstawowych – II etap edukacyjny – klasy IV-VI. Zajęcia komputerowe. Treści szczegółowe:
- Rozwiązywanie problemów i podejmowanie decyzji z wykorzystaniem komputera. Uczeń: 5.2. uczestniczy w pracy zespołowej, porozumiewa się z innymi osobami podczas realizacji wspólnego projektu, podejmuje decyzje w zakresie swoich zadań i uprawnień.
- Wykorzystywanie komputera oraz programów i gier edukacyjnych do poszerzania wiedzy z różnych dziedzin. Uczeń: 6.1. korzysta z komputera, jego oprogramowania i zasobów elektronicznych (lokalnych i w sieci) do wspomagania i wzbogacania realizacji zagadnień z wybranych przedmiotów; 6.2. korzysta z zasobów (słowników, encyklopedii, sieci Internet) i programów multimedialnych (w tym programów edukacyjnych) z różnych przedmiotów i dziedzin wiedzy.
Metody pracy:
- Objaśnienie
- Pokaz
- Ćwiczenia laboratoryjne
- Projekt
Materiały pomocnicze:
- Zestaw EDUBOX LOFI Robot (Sterownik LOFI Brain, Powerbank, Dwa silniki DC wraz z kołami, Komplet części drewnianych, Czujnik odległości - HC-SR04)
- Śrubokręty, śrubki i nakrętki (znajdują się w zestawie EDUBOX LOFI Robot)
- Laptop/komputer nauczycielski, projektor i tablica projekcyjna.
- Ewentualnie: wydrukowane schematy / instrukcje składania robota.
- Aparat fotograficzny, kamera itp. - do przygotowania dokumentacji.
Przebieg zajęć:
1. Wprowadzenie w tematykę i integracja grupy
Uwaga: Warto pamiętać o dokumentacji prowadzonego projektu. Wyznacz ucznia lub sam/sama pamiętaj o zrobieniu filmiku lub kilku zdjęć uczniom składającym roboty.
Informujemy uczniów, że dziś rozpoczniemy składanie własnego pierwszego robota. Będzie to robot-pojazd. Zanim będzie mógł się poruszać - jeździć, omijać przeszkody itp. - musimy zbudować jego szkielet. Do tego celu potrzebne będą elementy konstrukcyjne (w przypadku LOFI Robot są to elementy drewniane wycięte ze sklejki oraz śrubki i nakrętki, którymi będziemy łączyć elementy drewniane).
Dzielimy uczniów na grupy (najlepiej 2-3 osobowe; jeśli mamy dużą liczbę uczniów i mało zestawów EDUBOX LOFI Robot, dzielimy uczniów w klasie na tyle grup, ile mamy zestawów). Każdej grupie przydzielamy jeden zestaw EDUBOX.
Uwaga: uczniom potrzebna będzie spora przestrzeń do budowy i testowania robota. Typowa ławka szkolna to zwykle zbyt mała powierzchnia - drobne elementy i robot mogą z niej łatwo spaść. Dobrze byłoby złączyć po dwie ławki i uczniów usadzić dookoła.
Zachęcamy uczniów do otwarcia pudełek (odkręcenie śrubek), wyjęcia podzespołów i rozłożenia na ławkach w taki sposób, aby był dobry dostęp do różnych elementów konstrukcyjnych, kabli i modułów. Do złożenia robota-pojazdu potrzebne będą:
- Sterownik LOFI Brain
- Powerbank
- Dwa silniki DC wraz z kołami
- Komplet części drewnianych, które będziemy wyłamywać z tabliczek
- Czujnik odległości - HC-SR04
Część zasadnicza
Czas na realizację tej części: ok 30 minut.
Ćwiczenie 1 - skręcamy boki pojazdu i montujemy silniki (ok. 15 min)
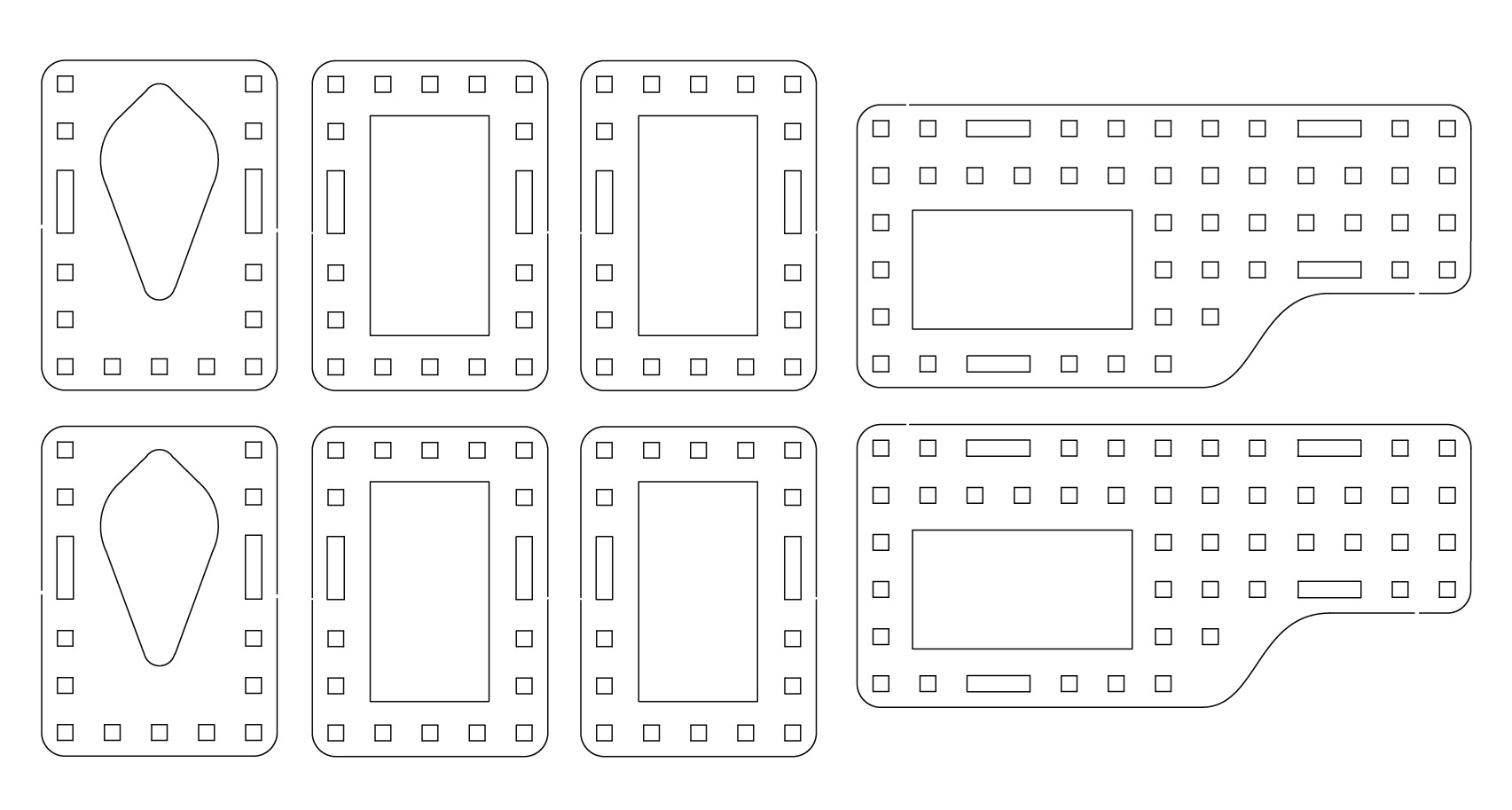
Z dostępnych drewnianych elementów szkieletu odnajdź i wyłam z tabliczki (szkielety otaczające tabliczki mogą się połamać; uważaj tylko, aby nie uszkodzić naszych docelowych elementów) i ułóź przed sobą 8 elementów (po 2 takie same elementy - tak jak na poniższym schemacie), 2 silniki oraz 4 dłuższe śrubki i 4 nakrętki.
Uwaga: w zestawie znajdują się śrubki o dwóch dlugościach. W tym kroku używamy tych dłuższych. Natomiast wszystkie nakrętki są takie same.
Wszystkie niezbędne w tym ćwiczeniu drewniane elementy konstrukcyjne i połóż przed sobą.
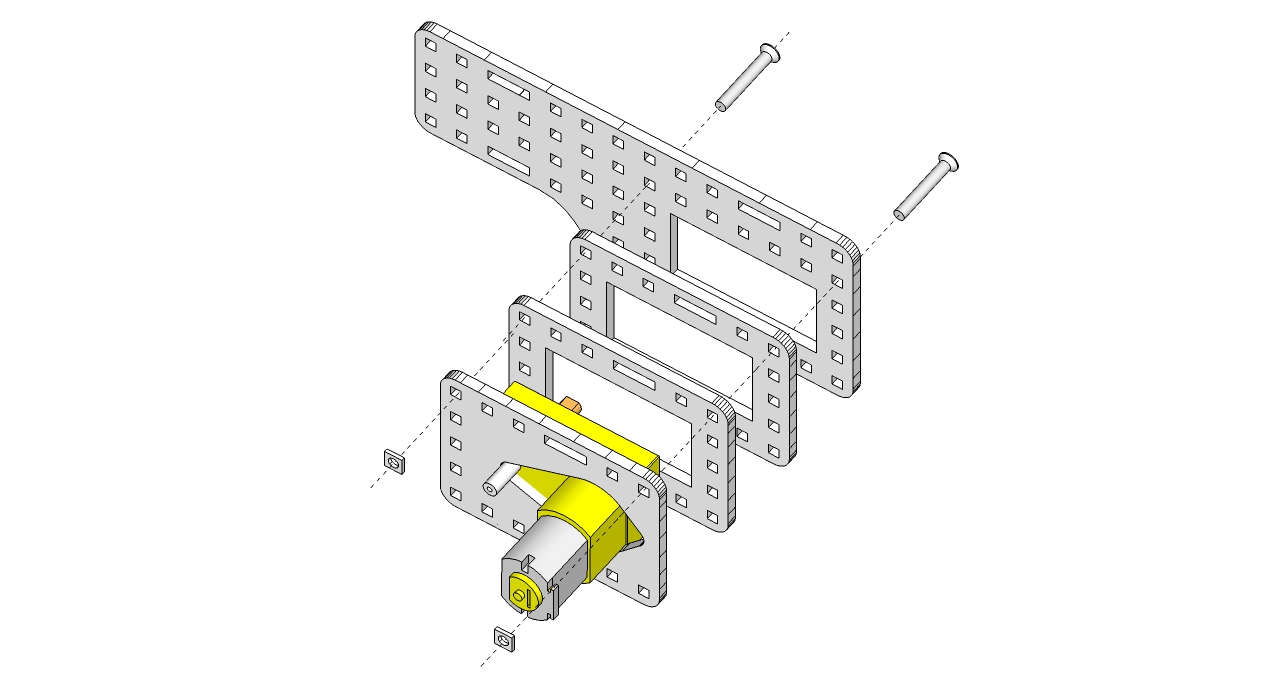
Złóż bok i zamocuj silnik dokładnie tak, jak pokazano na schemacie poniżej. Całość skręć przy pomocy śrubokręta.
Uwaga: najpierw ostrożnie przeciągnij kabel silnika. Drewniane elementy są dość ściśle spasowane z silnikiem. Musisz być precyzyjny i użyć odpowiedniej siły. Nie ściskaj jednak na siłę, za mocno, aby nie połamać klocków. Następnie złóż mocowanie drugiego silnika. Pamiętaj jednak, żeby drugi silnik zmontować w lustrzanym odbiciu!
Skręcone silniki odłóż na bok na ławce - do “magazynu elementów gotowych”.
Ćwiczenie 2 - przykręcamy sterownik do korpusu (ok. 5 min)
Z dostępnych w zestawie elementów przygotuj: największy element drewniany (będzie on stanowił górną ściankę korpusu robota) 4 drewniane okrągłe podkładki, Sterownik LOFI BRAIN oraz po 4 krótsze śrubki i nakrętki. Wyłam wszystkie niezbędne w tym ćwiczeniu drewniane elementy konstrukcyjne i połóż przed sobą.
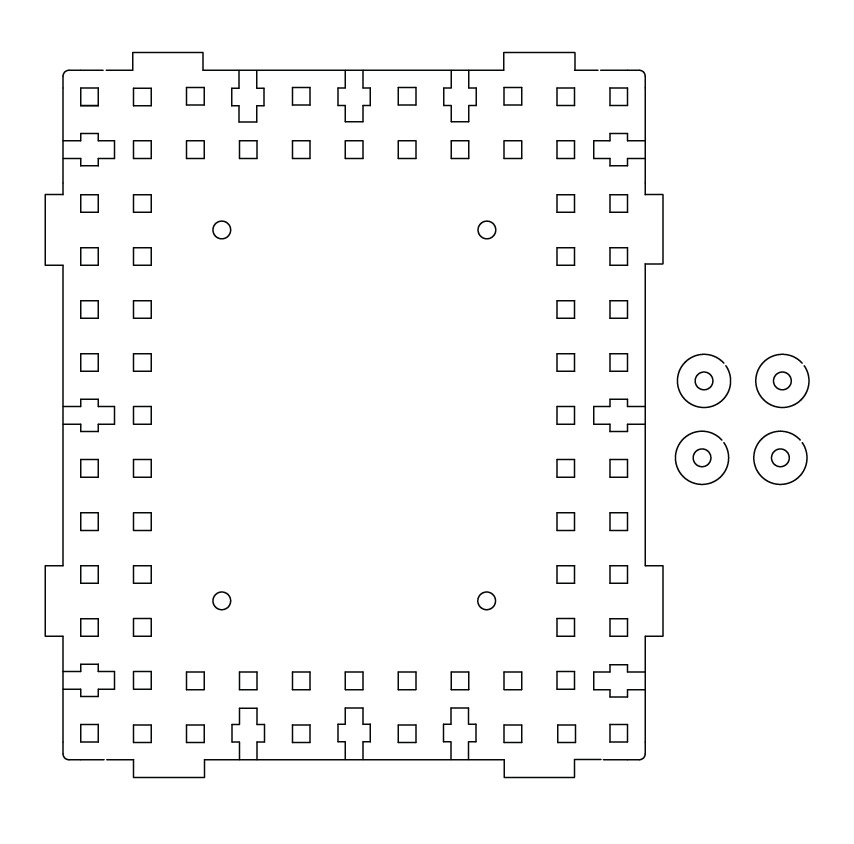
Pomiędzy drewniany korpus a sterownik LOFI BRAIN podłóż 4 drewniane podkładki. Do korpusu przykręć na środku (tak jak na schemacie poniżej) sterownik LOFI BRAIN przy pomocy 4 śrubek (pamiętaj aby każda śrubka przechodziła przez: sterownik, podkładkę i korpus).
Uwagi: Strona po której znajdują się gniazda USB stanowić będzie tył pojazdu.

Korpus z przykręconym “mózgiem” (sterownikiem) odłuż na bok - do “magazynu elementów gotowych”.
Ćwiczenie 3 - budujemy przód naszego pojazdu (ok. 10 min)
Z dostępnych w zestawie elementów przygotuj: czujnik odległości, 4 drewniane elementy ze schematu poniżej oraz 5 krótkich śrubkek i nakrętek. Wyłam drewniane elementy konstrukcyjne i ułóż przed sobą.

Zmontuj uchwyt do czujnika odległości HC-06 zgodnie ze schematem poniżej:
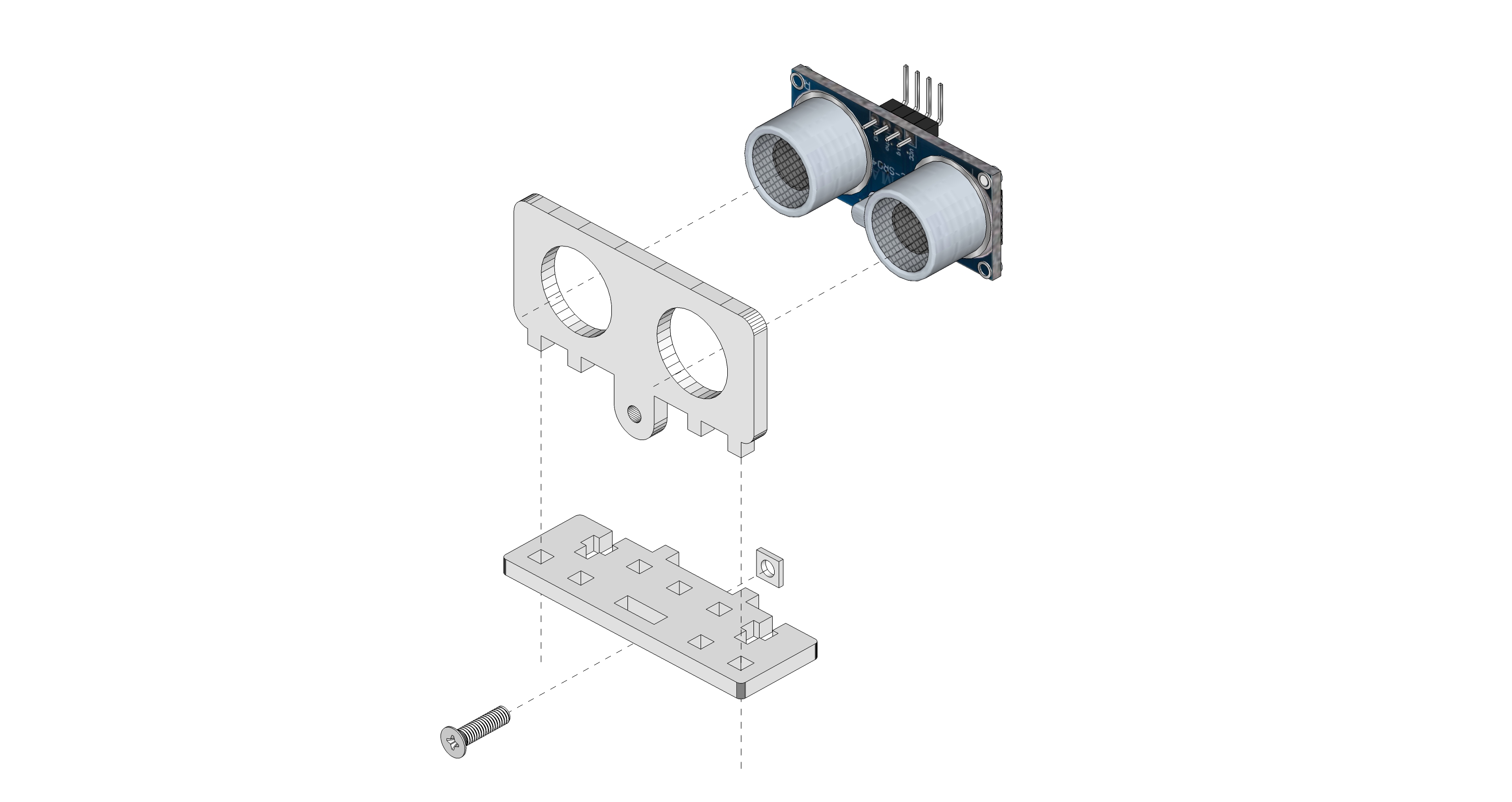
Uwaga: Drewniane elementy są dość ściśle spasowane z czujnikiem. Musisz być precyzyjny, nie wciskaj nic na siłę, np. pod skosem, aby nie uszkodzić elektronicznych elementów.
Wskazówka: wkręcając śrubkę, najpierw podłóż nakrętkę, dopiero później do otworu włóż śrubkę i dokręć mocno śrubokrętem, aż nakrętka zostanie dociągnięta do sklejki.
Następnie, zgodnie z poniższym schematem, przymocuj “uśmiech” i czujnik odległości do przedniej ścianki pojazdu:

Podsumowanie i ewaluacja
Czas na realizację tej części: ok 5 minut.
Zadajemy uczniom pytanie i sprawdzamy: Czy wszystkim grupom udało się dziś:
- Skręcić oba boki pojazdu z silnikami?
- Przykręcić sterownik do korpusu?
- Przygotować ścianę frontową pojazdu z czujnikiem odległości?
Pytamy uczniów:
- Co przysporzyło Wam najwięcej problemów?
- Co dało najwięcej satysfakcji?
Prosimy uczniów o posprzątanie zestawów do pudełek tak, aby nic się nie zgubiło. Zalecamy podpisanie każdego zestawu, aby było wiadomo, kto jest za niego odpowiedzialny. Zalecamy, aby bezpośrednio po lekcji nr 3 realizować lekcję nr 4.